Ui, das ist ja einfach zu rechnen. Dein merlo muss 22cm breit sein, und nicht 22 studs.

-
Herzlich willkommen!
Das Team von »Doctor Brick« heißt Euch herzlich willkommen und wünscht Euch viel Spaß hier!
»Doctor Brick« ist eine anerkannte Community (RLOC) für erwachsene LEGO Enthusiasten, auch AFOLs (= Adult Fans Of LEGO) genannt.
Wir können uns hier über alle Belange des LEGO Hobbys austauschen wie z.B. Set- und Teilefragen, Vorstellung und Rezensionen von Legobauten.
Bitte beachtet die Nutzungsbedingungen und den Verhaltensleitfaden.
Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Fahrzeugachsen
- Ersteller efferman
- Erstellt am
Big A84
Neumitglied
Ich sage ja, blutiger Anfänger :/
Bin noch in der Lernphase.
Bin noch in der Lernphase.
Die xerion reifen sind fast exakt im maßstab 1:10 im verhältnis zu deinem orginal. Deswegen kannst einfach die maße vom orginal nehmen und das komma um eine stelle nach vorne schieben.
Für dein modell befindet sich hier im thema sicher mehr als eine achse die passt.
Für dein modell befindet sich hier im thema sicher mehr als eine achse die passt.
Big A84
Neumitglied
Moin in die Runde, ich habe nochmal eine Frage in die Runde.
Erstmal danke an @efferman für die genial Vorlage der Achse. Die hat mir echt sehr viel weiter geholfen. Ich habe mich jetz für deses Modell entschieden und werde es für vorne und hinten einsetzen...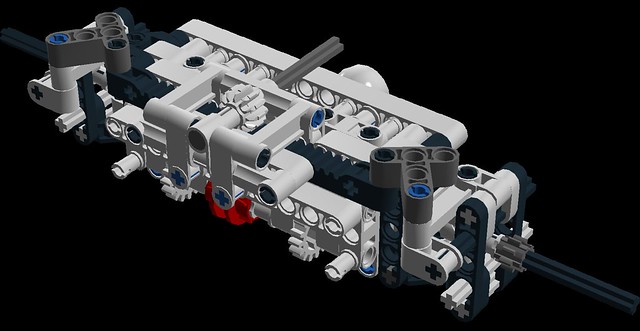
Ich weiß allerdings nicht was ich mit der Kugelförmigen öffnung anfangen soll, bzw wie ich die zu verwenden habe...
Ich wünsche euch allen noch einen schönen Restsonntag.
Erstmal danke an @efferman für die genial Vorlage der Achse. Die hat mir echt sehr viel weiter geholfen. Ich habe mich jetz für deses Modell entschieden und werde es für vorne und hinten einsetzen...
Ich weiß allerdings nicht was ich mit der Kugelförmigen öffnung anfangen soll, bzw wie ich die zu verwenden habe...
Ich wünsche euch allen noch einen schönen Restsonntag.
KikoTube
Stammuser
Hi „BigA84“
Das ist das Gegenstück der Lego Technic Kugelpfanne. An diesem Gelenk findet die vertikale Bewegung statt. Damit kann die Achse rauf und runter federn und seitlich drehen
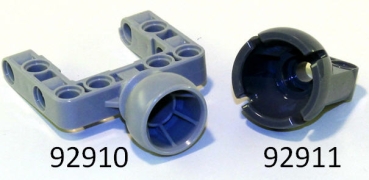
Das ist das Gegenstück der Lego Technic Kugelpfanne. An diesem Gelenk findet die vertikale Bewegung statt. Damit kann die Achse rauf und runter federn und seitlich drehen
Hallo Forum,
Habe mir heute Gedanken zu den - oft verwendeten - Vor- & Nachlaufachsen gemacht; Bei manchen Modellen musste ich leider feststellen, dass die Lenkeinschläge irgendwie nicht zusammenpassen. Dann kam mir die Skizze von Michael bzgl. des Ackermann'es in den Sinn.
Somit gings los, Achsabstände mal auf Papier zu bringen;
Vorlaufachse, und Nachlaufachse kurz vor den beiden hinteren Zwillingsbereiften Achsen - SLT Style;
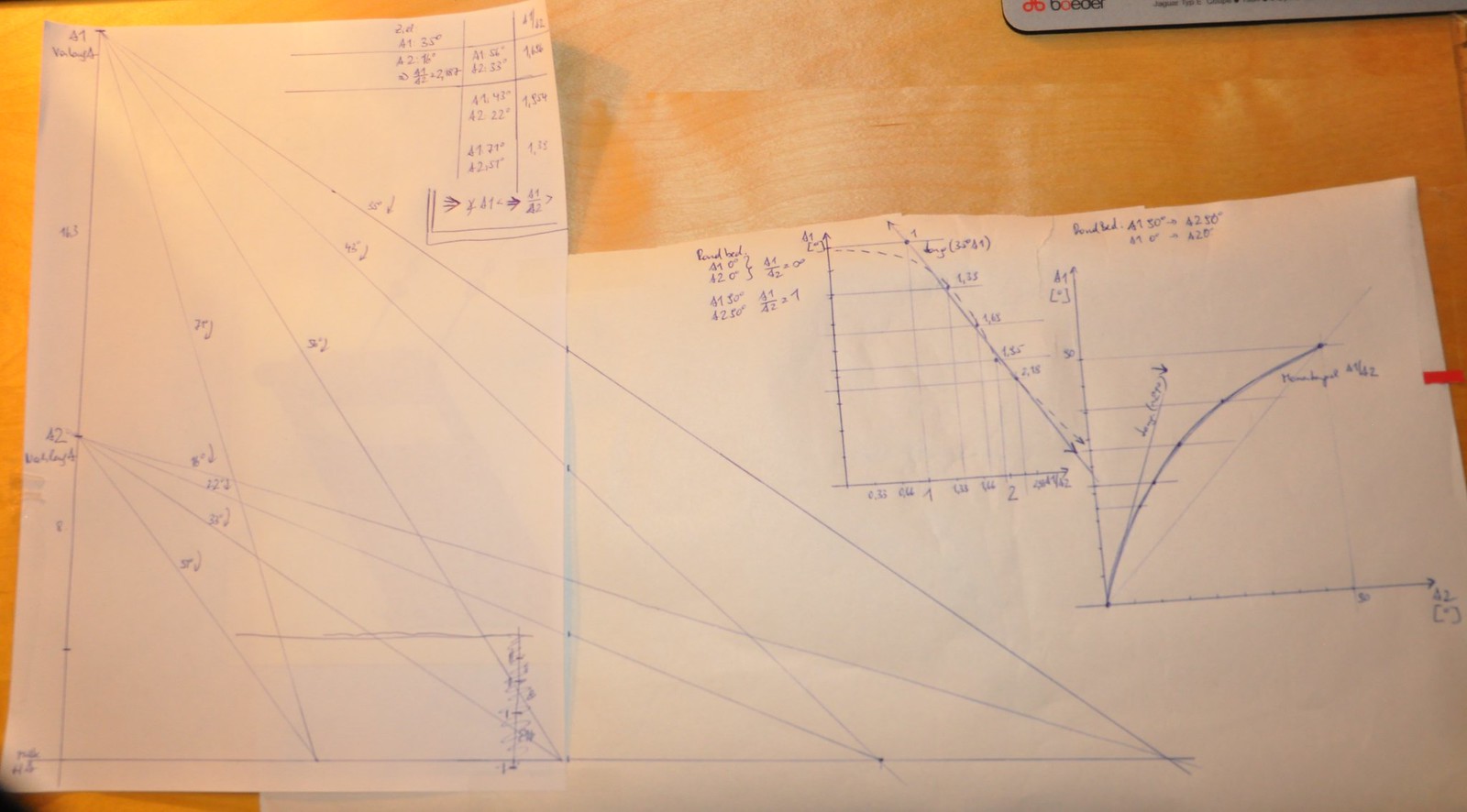
A1 bezeichnet die Vorlaufachse (Achse 1), Achse 2 (A2) die Nachlaufachse; die Horizontale erfolgt im Mittel der beiden hinteren ungelenkten Achsen (um die sich ja der Ackermann in der stationären Kreisfahrt bezieht);
Zu Beginn konnte festgestellt werden, dass mit sinkendem Lenkwinkel das Verhältnis zwischen Vor- & Nachlaufachse steigt;
Bsp:
Lenkwinkel A1 = 35° => A2 = 16°; A1/A2= 2,18
Lenkwinkel A1 = 43° => A2 = 22°; A1/A2= 1,95
Nachstehend zeigt die Grafik links die ermittelten Lenkwinkel für die Nachlaufachse A2 infolge des Schnittpunktes mit der Vorlaufachse;
Grafisch stellte ich noch die nicht lineare Abhängigkeit - in diesem Fall die Parabel der Lenkeinschläge im rechten Diagramm dar; Die Grafik in der Mitte zeigt die Abhängigkeit vom Lenkwinkel der Vorlaufachse zum Verhältnis Vorlauf- & Nachlaufachse.
Wie soll man bitte eine Nachlaufachse vernünftig auslegen?
Grundidee war, mit Servo die Vorlaufachse anzusteuern, und mit Getriebeübersetzung (gleich dem Verhältnis Achse 1 zu Achse 2) auf die Nachlaufachse zu übergeben. Nur leider ist die Lenkung exponentiell und nicht linear;
Um nicht lineare Wege abzubilden, müsste man eigentlich eine rotatorische Komponenten ins Spiel bringen (Quasi Kurbeltrieb);
Oder steh ich komplett am Schlauch und habe einen / viele Denkfehler?
Wie würdet ihr eine Vorlauf / Nachlaufachse auslegen?
Ich danke vorab an die Chefärzte und ersuche höflichst um Stellungnahme bei der Achermann'schen Erkrankung")
LG, Jochi
Habe mir heute Gedanken zu den - oft verwendeten - Vor- & Nachlaufachsen gemacht; Bei manchen Modellen musste ich leider feststellen, dass die Lenkeinschläge irgendwie nicht zusammenpassen. Dann kam mir die Skizze von Michael bzgl. des Ackermann'es in den Sinn.
Somit gings los, Achsabstände mal auf Papier zu bringen;
Vorlaufachse, und Nachlaufachse kurz vor den beiden hinteren Zwillingsbereiften Achsen - SLT Style;
A1 bezeichnet die Vorlaufachse (Achse 1), Achse 2 (A2) die Nachlaufachse; die Horizontale erfolgt im Mittel der beiden hinteren ungelenkten Achsen (um die sich ja der Ackermann in der stationären Kreisfahrt bezieht);
Zu Beginn konnte festgestellt werden, dass mit sinkendem Lenkwinkel das Verhältnis zwischen Vor- & Nachlaufachse steigt;
Bsp:
Lenkwinkel A1 = 35° => A2 = 16°; A1/A2= 2,18
Lenkwinkel A1 = 43° => A2 = 22°; A1/A2= 1,95
Nachstehend zeigt die Grafik links die ermittelten Lenkwinkel für die Nachlaufachse A2 infolge des Schnittpunktes mit der Vorlaufachse;
Grafisch stellte ich noch die nicht lineare Abhängigkeit - in diesem Fall die Parabel der Lenkeinschläge im rechten Diagramm dar; Die Grafik in der Mitte zeigt die Abhängigkeit vom Lenkwinkel der Vorlaufachse zum Verhältnis Vorlauf- & Nachlaufachse.
Wie soll man bitte eine Nachlaufachse vernünftig auslegen?
Grundidee war, mit Servo die Vorlaufachse anzusteuern, und mit Getriebeübersetzung (gleich dem Verhältnis Achse 1 zu Achse 2) auf die Nachlaufachse zu übergeben. Nur leider ist die Lenkung exponentiell und nicht linear;
Um nicht lineare Wege abzubilden, müsste man eigentlich eine rotatorische Komponenten ins Spiel bringen (Quasi Kurbeltrieb);
Oder steh ich komplett am Schlauch und habe einen / viele Denkfehler?
Wie würdet ihr eine Vorlauf / Nachlaufachse auslegen?
Ich danke vorab an die Chefärzte und ersuche höflichst um Stellungnahme bei der Achermann'schen Erkrankung
LG, Jochi
aaalso, abseits des lenktrapezes das dass berüchtigte bild zeigt hängt alles vom abstand der achsen zueinander ab.
nehmen wir mal an wir haben eine starre achse, eine lenkachse und eine nachlaufachse.
die vorderste achse ist von der hintersten 30 studs weg,
die starre achse ist von der hintersten 10 studs weg, also haben wir ein 2:1 verhältnis bei den Lenkwinkeln.
Ja ich bin faul und mags beim rechnen einfach, weshalb hier einfach eine 12:24er kombi dazwischengeschaltet wird um zu erreichen dass die nachlaufachse einen lenkeinschlag hat der die hälfte des lenkeinschlages der Lenkachse beträgt.
nehmen wir mal an wir haben eine starre achse, eine lenkachse und eine nachlaufachse.
die vorderste achse ist von der hintersten 30 studs weg,
die starre achse ist von der hintersten 10 studs weg, also haben wir ein 2:1 verhältnis bei den Lenkwinkeln.
Ja ich bin faul und mags beim rechnen einfach, weshalb hier einfach eine 12:24er kombi dazwischengeschaltet wird um zu erreichen dass die nachlaufachse einen lenkeinschlag hat der die hälfte des lenkeinschlages der Lenkachse beträgt.
Big A84
Neumitglied
Hallo Michael,
So wäre mein Ansatz ursprünglich auch gedacht;
Bei einem Vorlauf-Nachlaufverhältnis von 2, bzw. kleiner 2 hätte ich eine 20:11er Paarung ins Spiel gebracht; So liegt die Übersetzung bei etwa 1,82. Dieses deckt einen Lenkwinkel bis etwa 50° ab.
Ein Servomotor hat +/-90° ...mit einem 11er Zahnrad komm ich da etwa auf +/-45° Einschlag? Oder ist es ratsamer, weniger auf den max. Einschlag zu rechnen und eher den Mittelwert (Verhältnis bei rd. 25° Lenkeinschlag) heranzuziehen?
So wäre mein Ansatz ursprünglich auch gedacht;
Bei einem Vorlauf-Nachlaufverhältnis von 2, bzw. kleiner 2 hätte ich eine 20:11er Paarung ins Spiel gebracht; So liegt die Übersetzung bei etwa 1,82. Dieses deckt einen Lenkwinkel bis etwa 50° ab.
Ein Servomotor hat +/-90° ...mit einem 11er Zahnrad komm ich da etwa auf +/-45° Einschlag? Oder ist es ratsamer, weniger auf den max. Einschlag zu rechnen und eher den Mittelwert (Verhältnis bei rd. 25° Lenkeinschlag) heranzuziehen?
Der Maximale lenkeinschlag ist erstmal egal, nur das verhältnis der lenkeinschläge muss passen. wenn du an der lenkachse den vollen lenkeinschlag hinbekommst dann nutze ihn auch. Wenn das 45° sind dann hätte die nachlkaufachse bei meinem beispiel eben 22,5° lenkeinschlag. Verluste durch spiel natürlich nicht einberechnet
In die Kugel passt ein Kardangelenk für den Antrieb !Big A84 schrieb:Vielen Dank @KikoTube Diese Verbindungen kannte ich noch garnicht. Man lernt halt nie aus.
@Jochi
ich denk bei der Vor- / Nachlaufachse kommt es nicht auf den genauen Winkel an, wenn daneben noch 2 Zwillingsbereifte Achsen sind.
Willst du Z 11 bei Shapeways bestellen, dann brauchst du noch Z 21 Zahnrad, sonst passt der Lochabstand nicht. Von Lego gibt's Z 12.
Big A84
Neumitglied
Guten Morgen meine Leidensgenossen,
ich brauche nochmal eure
Hilfe. Ich habe gestern die folgende Achse von @efferman gebaut und
musste jetzt ferststellen, das die Räder quasi keine Führung haben und
leider sehr "wabbelig" an der Achse hängen. Muss ich noch etwas ergänzen
zu der verhandenen Achse damit das funzt? Ich stehe wieder auf dem
Schlauch.
http://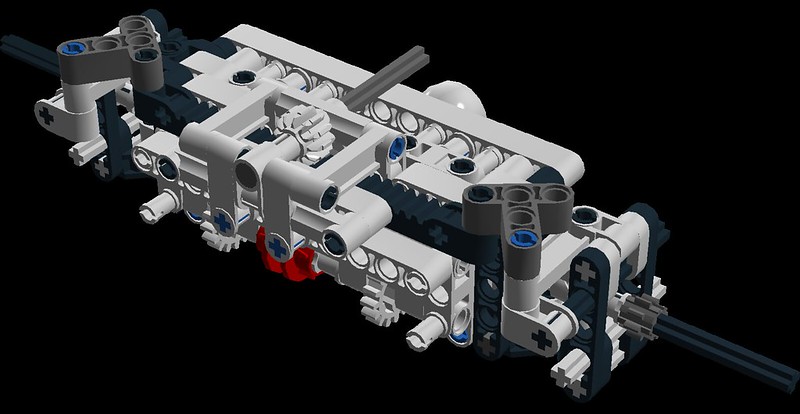 planetwithlockfrontaxle
planetwithlockfrontaxle
by Michael
Wirth, auf Flickr
Wünche euch allen Gute Besserung und einen schönen Mittwoch.
ich brauche nochmal eure
Hilfe. Ich habe gestern die folgende Achse von @efferman gebaut und
musste jetzt ferststellen, das die Räder quasi keine Führung haben und
leider sehr "wabbelig" an der Achse hängen. Muss ich noch etwas ergänzen
zu der verhandenen Achse damit das funzt? Ich stehe wieder auf dem
Schlauch.
http://
planetwithlockfrontaxleby Michael
Wirth, auf Flickr
Wünche euch allen Gute Besserung und einen schönen Mittwoch.
Hallo Big A84
hier eine andere Planetenachse von Effe, da sieht man die fehlenden Teile, nämlich die großen Drehscheiben #2.
 planetflat by Michael Wirth, auf Flickr
planetflat by Michael Wirth, auf Flickr
hier eine andere Planetenachse von Effe, da sieht man die fehlenden Teile, nämlich die großen Drehscheiben #2.
planetflat by Michael Wirth, auf FlickrBig A84
Neumitglied

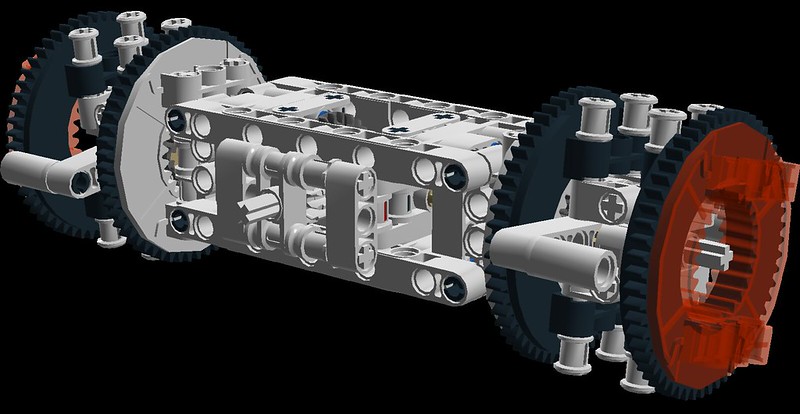
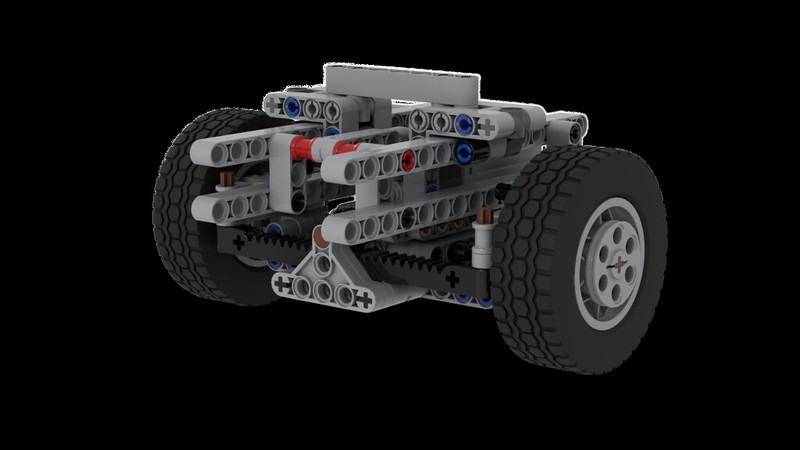
Seit langer zeit mal wieder eine achse von mir. Diesesmal gelenkt, nicht angetrieben und gemacht für flache Rahmen.
edit:
Bilder in real mit federn



Wie ihr seht muss das lxf noch n kleines bisschen angepasst werden.
edit²
Das File ist angepasst. Die Höhe der Rahmenoberkante ist im Prinzip nur abhängig von der Position der Federaufnahme. also Querbalken hoch und der Rahmen kommt runter und umgekehrt.
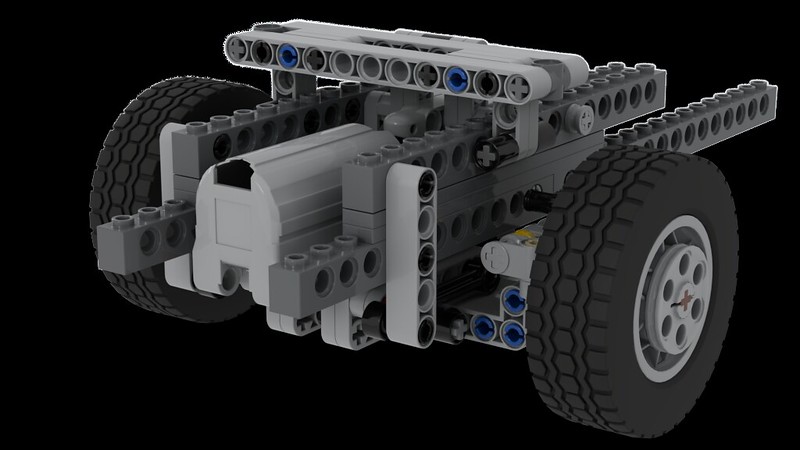
Aber Achtung, in der tiefen Position muss eventuell der vordere Anlenkpunkt der pushrods ein Loch nach oben
edit³
der rote liftarm ist die vorherige Rahmenoberkante.

edit:
Bilder in real mit federn
Wie ihr seht muss das lxf noch n kleines bisschen angepasst werden.
edit²
Das File ist angepasst. Die Höhe der Rahmenoberkante ist im Prinzip nur abhängig von der Position der Federaufnahme. also Querbalken hoch und der Rahmen kommt runter und umgekehrt.
Aber Achtung, in der tiefen Position muss eventuell der vordere Anlenkpunkt der pushrods ein Loch nach oben
edit³
der rote liftarm ist die vorherige Rahmenoberkante.
Anhänge
Zuletzt bearbeitet:
die Kleinen Federn haben doch diese schlitze im feststehenden körper. Da beidseitig mit etwas dünnem reindrücken und dann an der Kolbenstange ziehen.
Das was du rausgezogen hast muss dann ur noch durch ein pinloch das die funktion des feststehenden körpers übernimmt.
Das was du rausgezogen hast muss dann ur noch durch ein pinloch das die funktion des feststehenden körpers übernimmt.
